Programy komputerowe działające w środowisku MATLAB
opracowane przez dr inż. Stanisława Walczaka
CarDyn R1.0
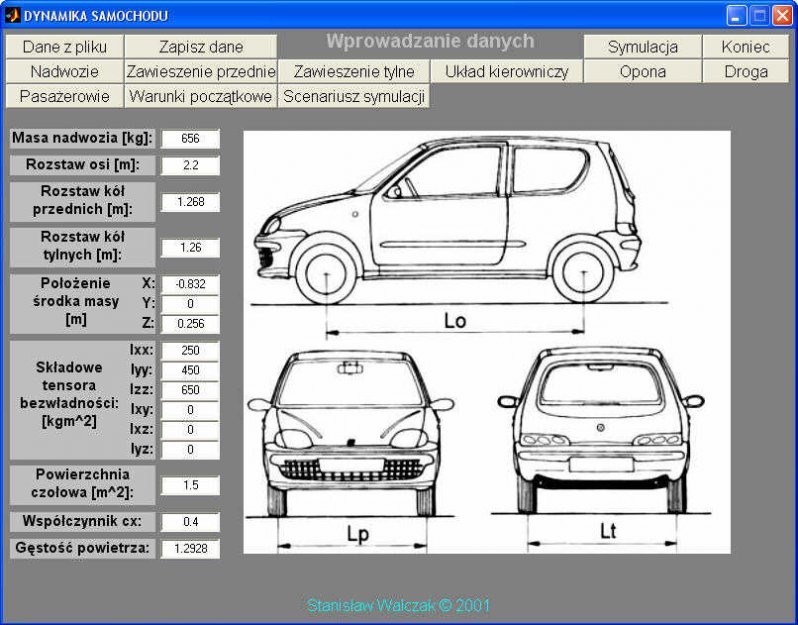
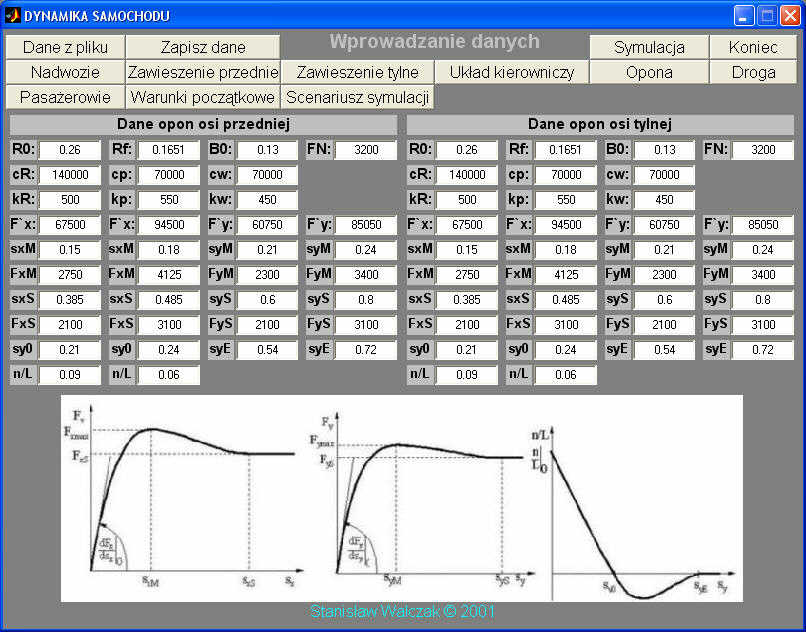
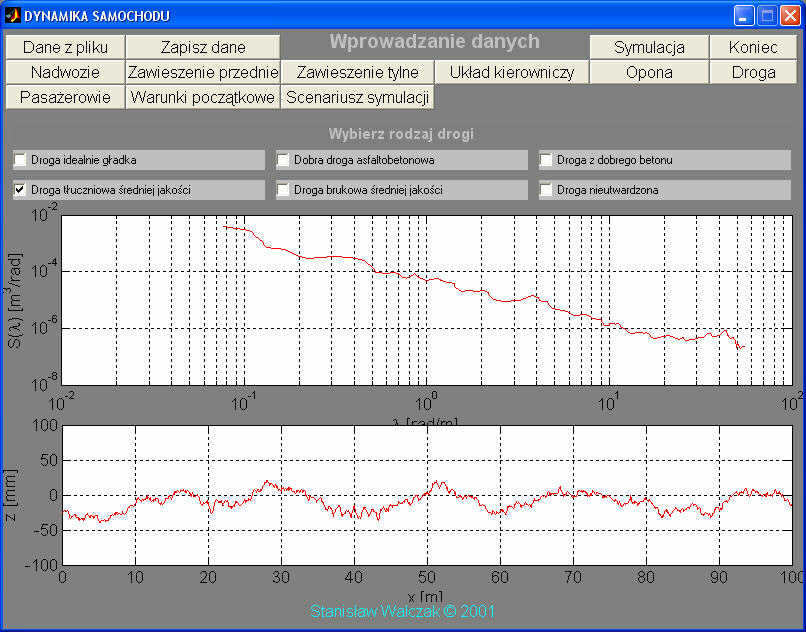
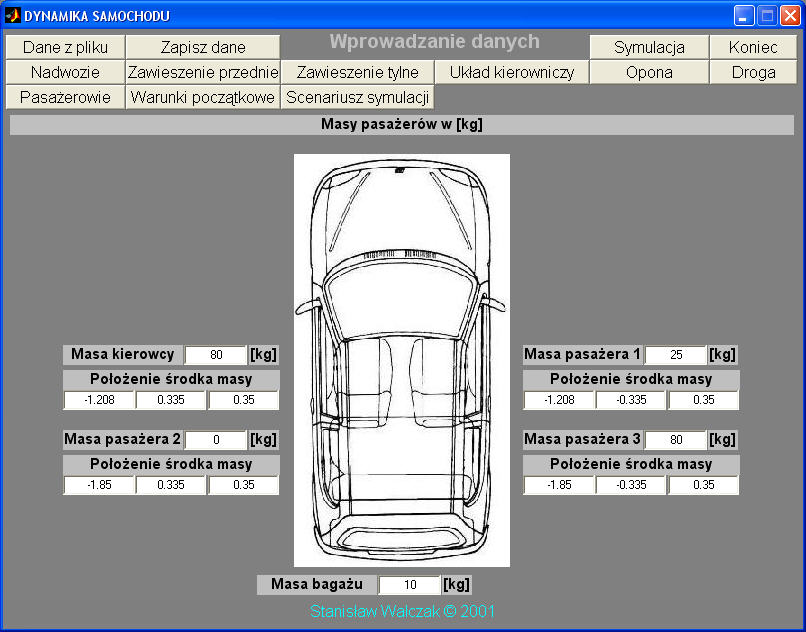
Program CarDyn R1.0 przeznaczony jest do symulacji dynamiki samochodu osobowego. Program składa się z:
- modelu samochodu 3D,
- modelu drogi 3D,
- modelu funkcji sterujących kierowcy.
Wyniki symulacji mogą być wyświetlane w ostaci animacji ruchu samochodu, przez postprocesor graficzny, który jest częścią programu. Animacja może być zapisana w postaci filmu AVI. Symulacja dynamiki samochodu w programie CarDyn może być wykorzystana do projektowania zawieszeń, układów kierowniczych oraz wyznaczania obciążeń działających na poszczególne elementy samochodu w rżnych warunkach ruchu. Program uruchamia ię z poziomu
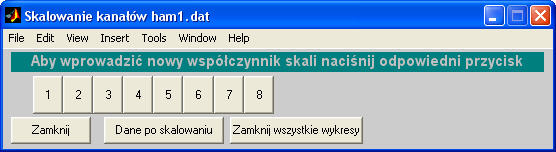
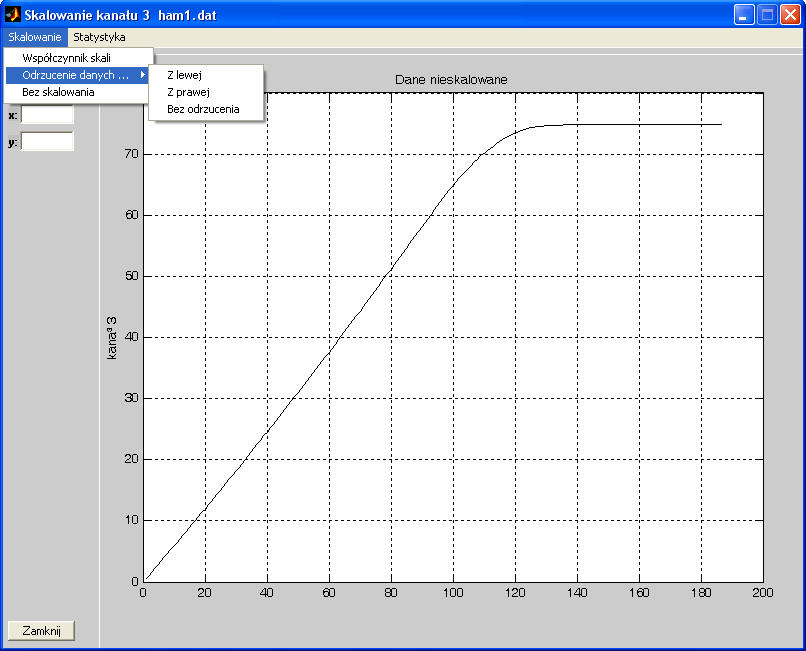
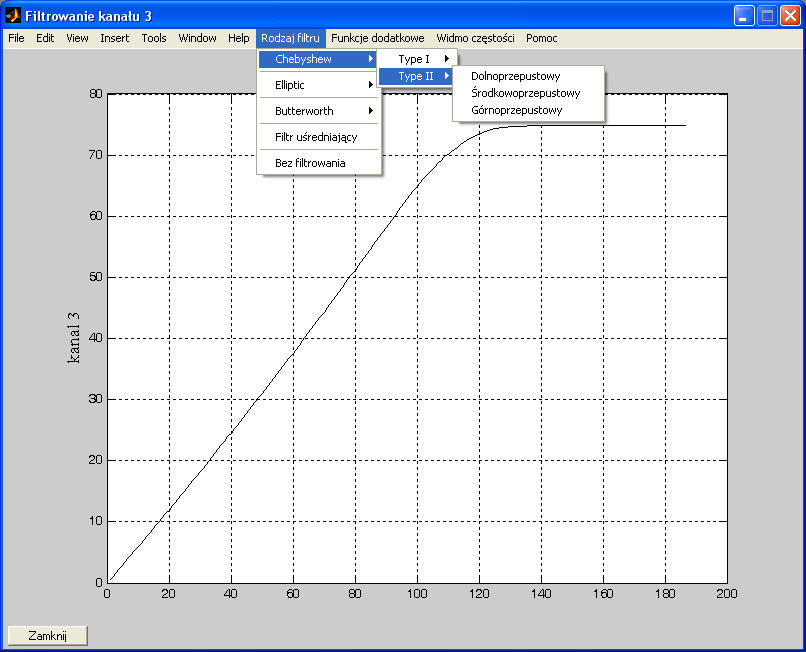
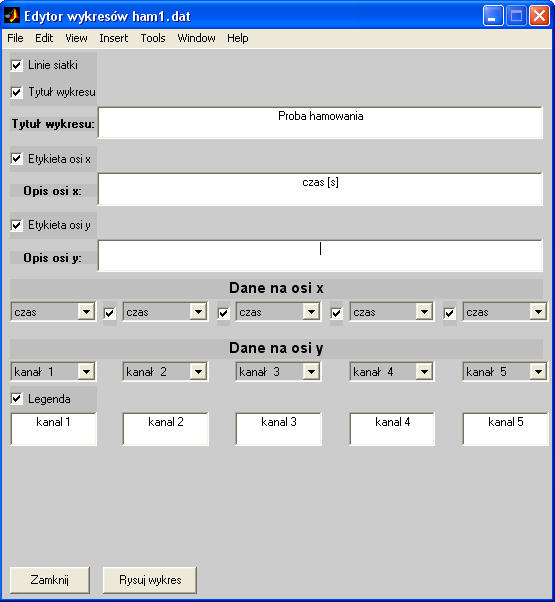
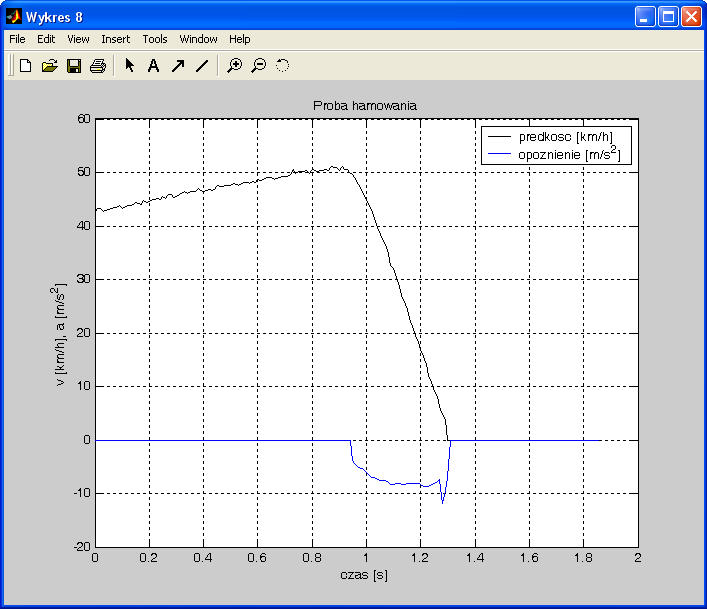
Badacz
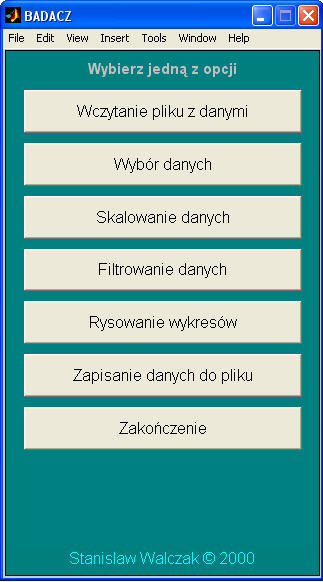
Program przeznaczony do obróbki danych doświadczalnych. Wczytuje pliki zapisane na dysku w formacie ASCII lub Excel. Posiada następujące opcje:
- wczytanie danych,
- wybór danych do dalszej analizy,
- skalowanie danych,
- filtrowanie danych,
- rysowanie wykresów,
- zapisanie danych po obróbce na dysk,
- zakończenie pracy programu i zamknięcie wszystkich okien graficznych.
Digitalizer
Program przeznaczony jest do digitalizacji wykresów zapisanych w postaci pliku rastrowego z rozrzerzeniem *.jpg. Przeskalowane dane zapisywane są na dysku w formacie ASCI lub Excel. Program posiada następujące opcje:
- wczytanie pliku graficznego,
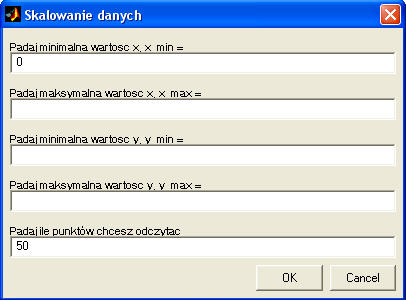
- - zadanie zakresu zmiennych na osi rzędnych i odciętych,
- - zadanie ilości punktów do digitalizacji,
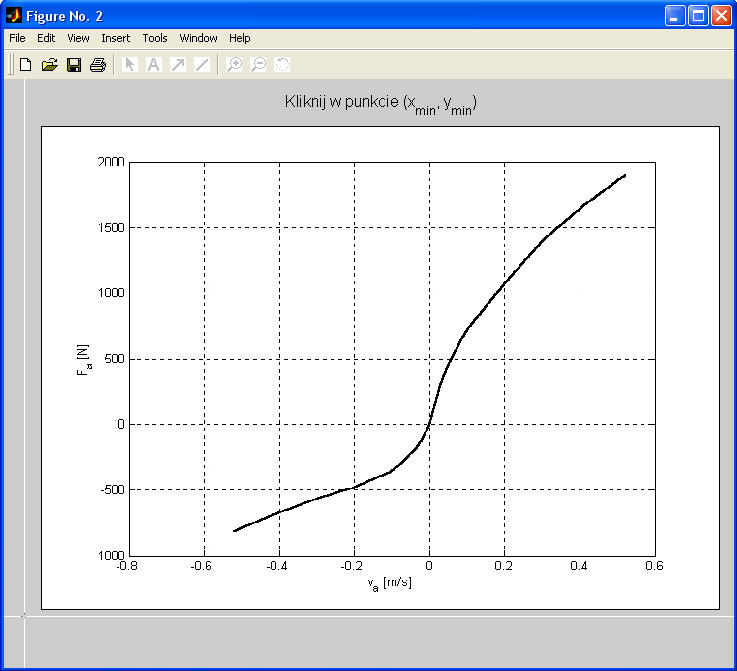
- - wskazanie punktów,
- - skalowanie danych i zapis do pliku.
- zakończenie pracy programu i zamknięcie wszystkich okien graficznych.
HIC
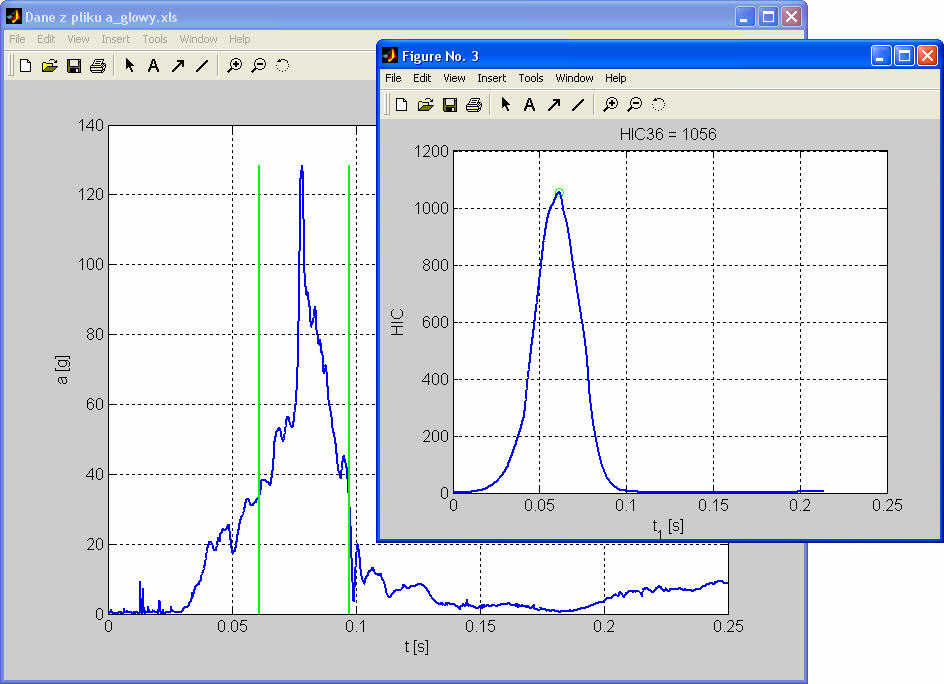
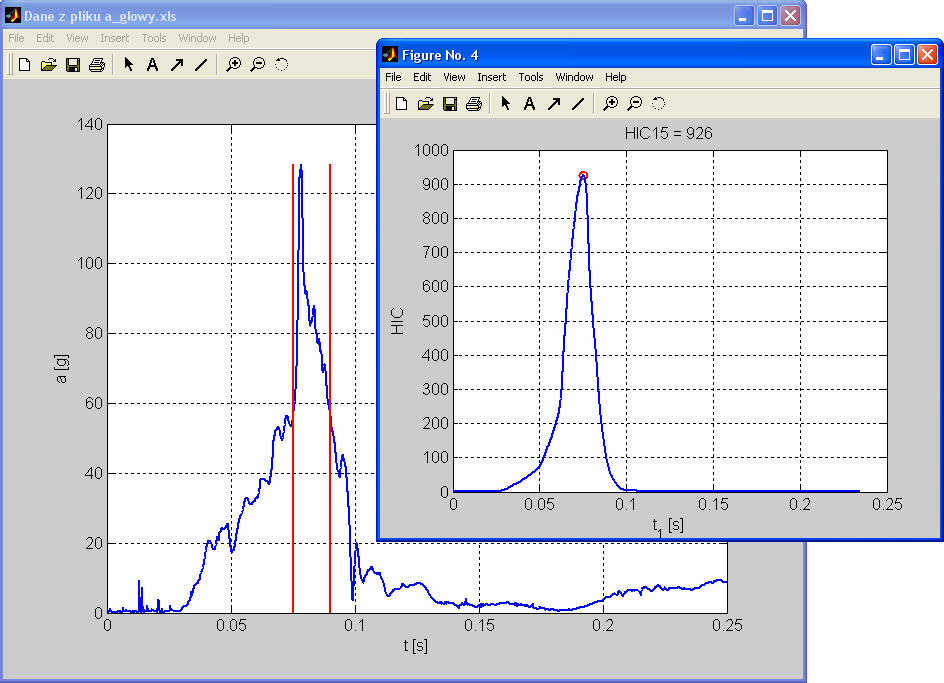
Program służy do wyznaczania wskaźnika HIC (Head Injury Criteria) na podstawie zarejestrowanego, podczas próby zderzeniowej, przebiegu przyspieszeń. Program posiada następujące opcje:
- wczytanie danych z pliku zapisanego w formacie ASCII lub Excel,
- wyznaczenie parametru HIC-36
- wyznaczenie parametru HIC-15
- zakończenie pracy programu i zamknięcie wszystkich okien graficznych.
Anim_ZAW
Program służy do wizualizacji ruchu zawieszenia, podczas dowolnego manewru. Parametry sterujące ruchem zawieszenia można wczytać z pliku, lub zadać w postaci dowolnej funkcji.
{mp4}eskret{/mp4}
{mp4}eugiecie{/mp4}
{mp4}eskret2w{/mp4}
{mp4}eugiecie2w{/mp4}